 Carnegie Mellon University School of Computer Science Executive and Professional Education
Carnegie Mellon University School of Computer Science Executive and Professional Education
Skip to Main Content
Safe Autonomy
What You'll Learn
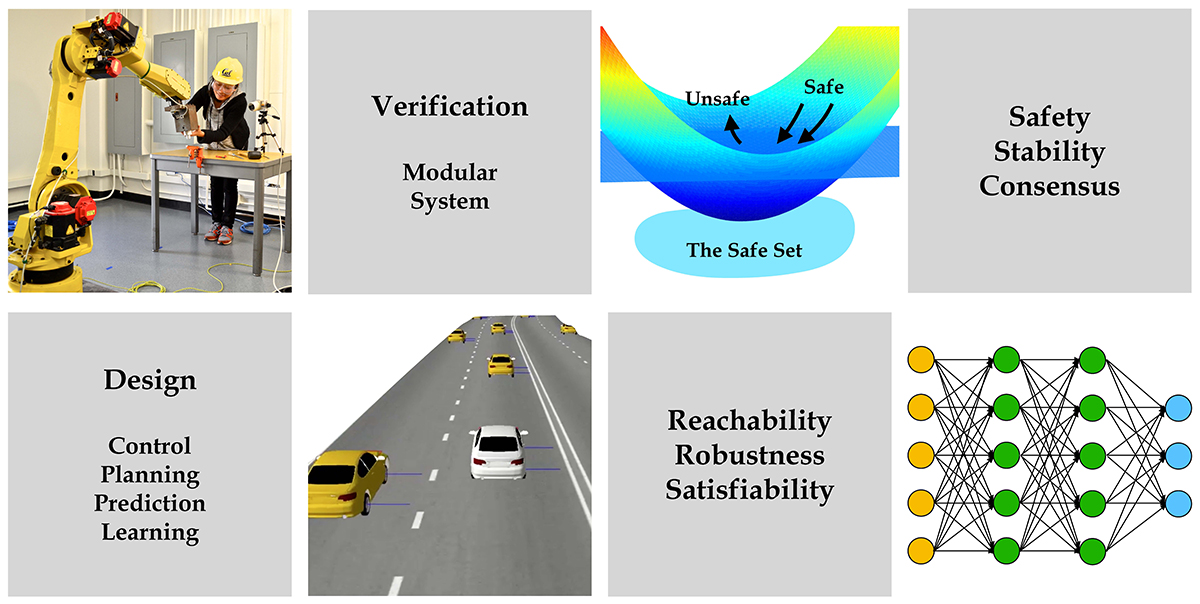
Safe autonomy has become increasingly critical in many application domains. When working with autonomous agents and systems, it's vital to ensure the safety of both the autonomous agent and other agents (humans or robots) that directly interact with it. For example, robots should be safe for human workers in human-robot collaborative assembly, and autonomous vehicles should be safe for others sharing the road.
For complex autonomous systems with many degrees of freedom, safe operation depends on all system components functioning correctly, including accurate perception, optimal decision-making, and safe control.
In this course, you'll learn both the design and the verification of safe robotic systems. From the design perspective, we will talk about how to assure safety through planning, prediction, learning and control. From the verification perspective, we will talk about verification of deep neural networks, safety or reachability analysis for closed loop systems, and analysis of multiagent systems.
Course Topics
- Safe control (control barrier functions).
- Safe planning in interactive environments.
- Safe prediction in interactive environments.
- Safe reinforcement, imitation and Bayesian learning.
- Responsibility-sensitive safety.
- Closed-loop stability and reachability analysis.
- Verification of deep neural networks.
- Design and verification of multiagent systems.