 Carnegie Mellon University School of Computer Science Executive and Professional Education
Carnegie Mellon University School of Computer Science Executive and Professional Education
Skip to Main Content
Introduction to Robot Autonomy
What You’ll Learn
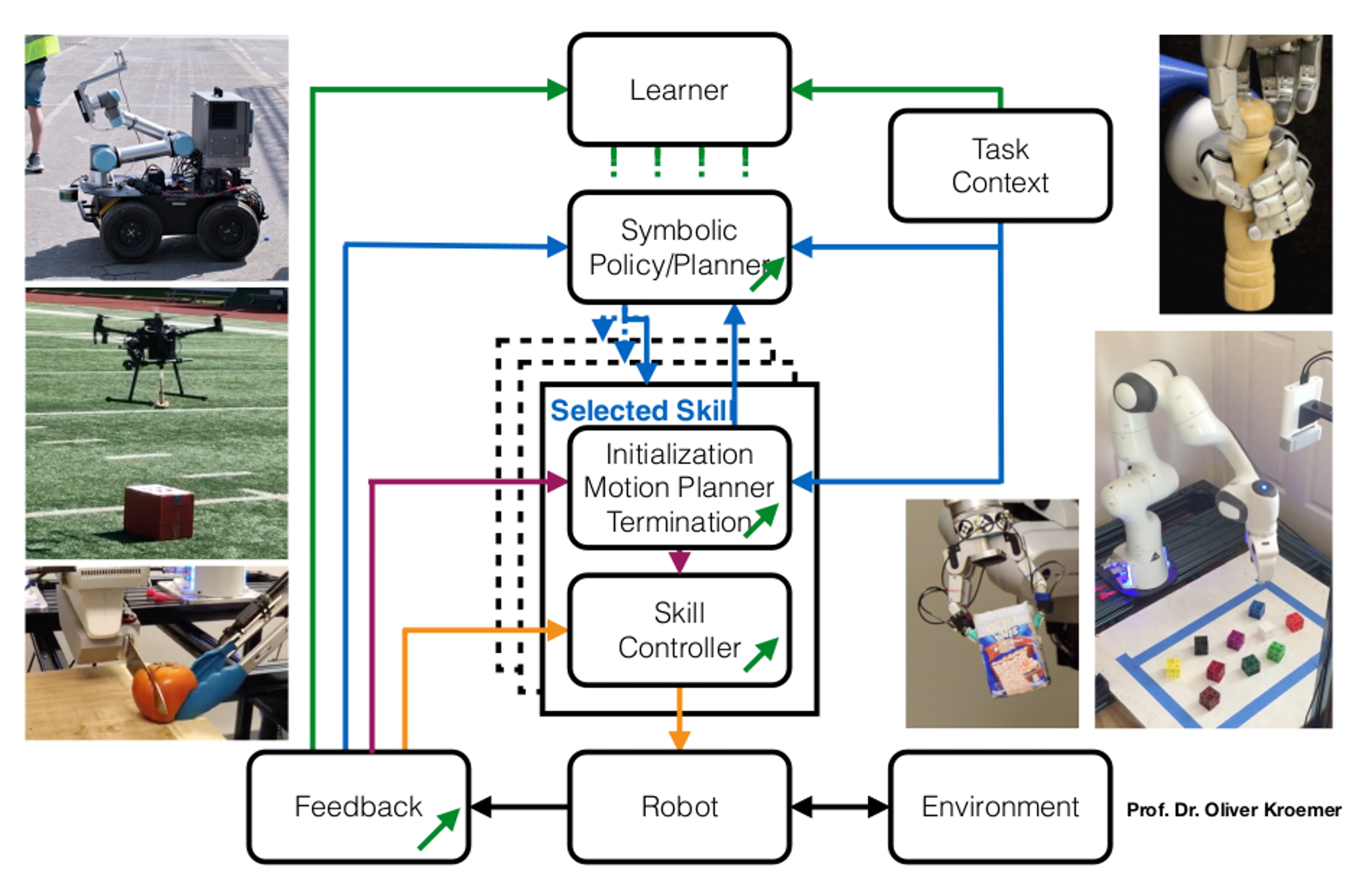
Robot Autonomy delves into the interplay between perception, manipulation, planning, and learning for autonomous systems. These components are required to develop autonomous robots for a wide range of domains including households, manufacturing, service industries, and healthcare. The course will explain the implementations, applications, and limitations of algorithms for each component, as well as how to combine them to create fully autonomous robot systems. The course emphasizes the implementation of the algorithms discussed in class through homework assignments in simulation as well as labs and class projects on real robots.
This introductory course will focus on teaching students core topics of robotics and AI through lectures and hands-on labs.
Course Topics:
Kinematics- Forward kinematics
- Inverse kinematics
- Collision checking
- PID control
- Interaction control
- Model-based control
- Configuration spaces
- Combinatorial motion planning
- Discrete search algorithms
- Rapidly-exploring Random Trees
- Probabilistic Roadmaps
- Planning with kineodynamic constraints
- Planning with costs
- Predicate-based task representations
- Hybrid systems and grasping
- Representing uncertainty
- Filtering for state estimation
- System Engineering
- System Design